Create your CubeMars account

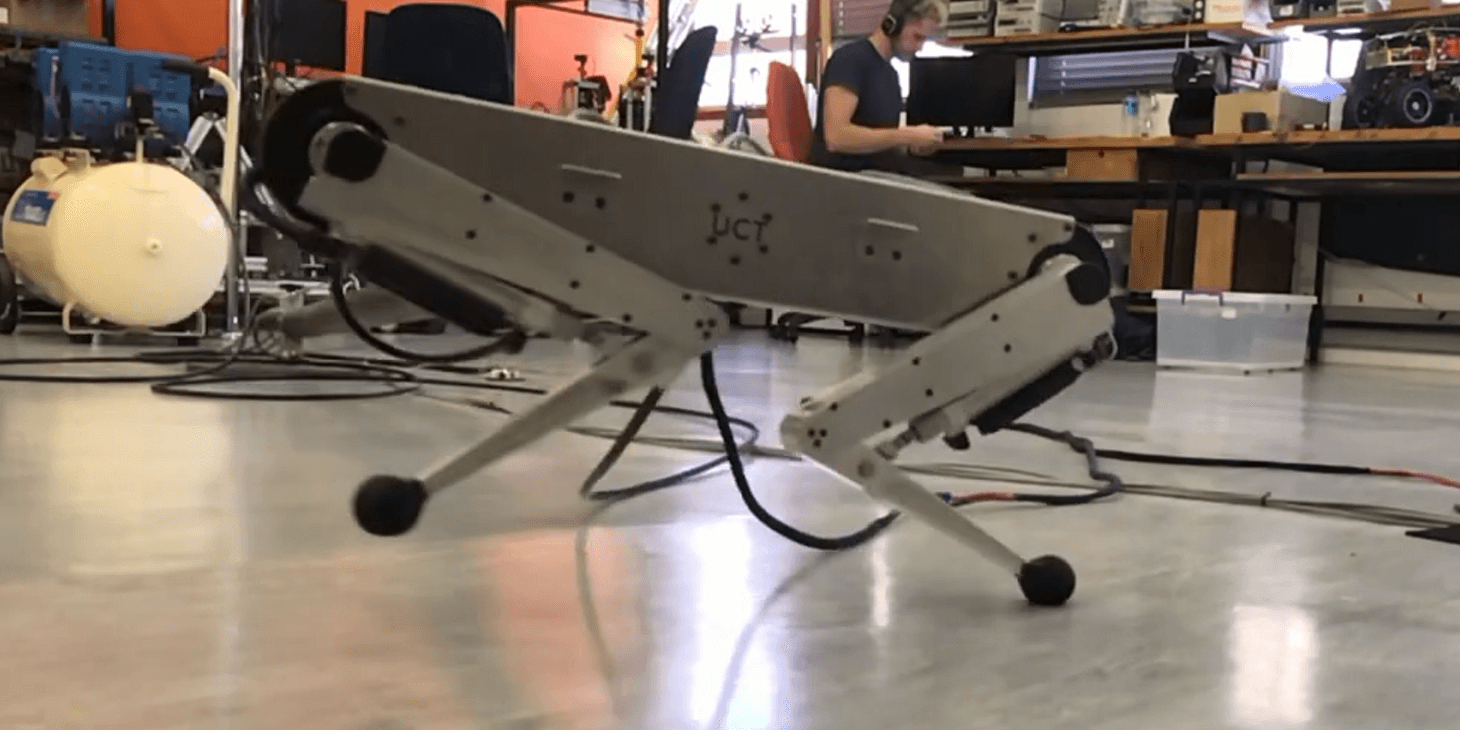
Driven by advancements in modern robotics, the development of dynamic gait and high maneuverability robots has become a frontier of research. The research team at the University of Cape Town has introduced an innovative quadrupedal robot named Kemba. Kemba adopts a hybrid design of electric and pneumatic actuators, showcasing its outstanding performance in dynamic behavior and precise control.
Mechanical Design and Drive System
Kemba’s mechanical design emphasizes lightweight and high performance. The robot has a body length of 0.5 meters and a weight (excluding the boom arm) of approximately 4.3 kilograms. Kemba utilizes two different drive systems for the hip and knee joints.
Hip Joint:
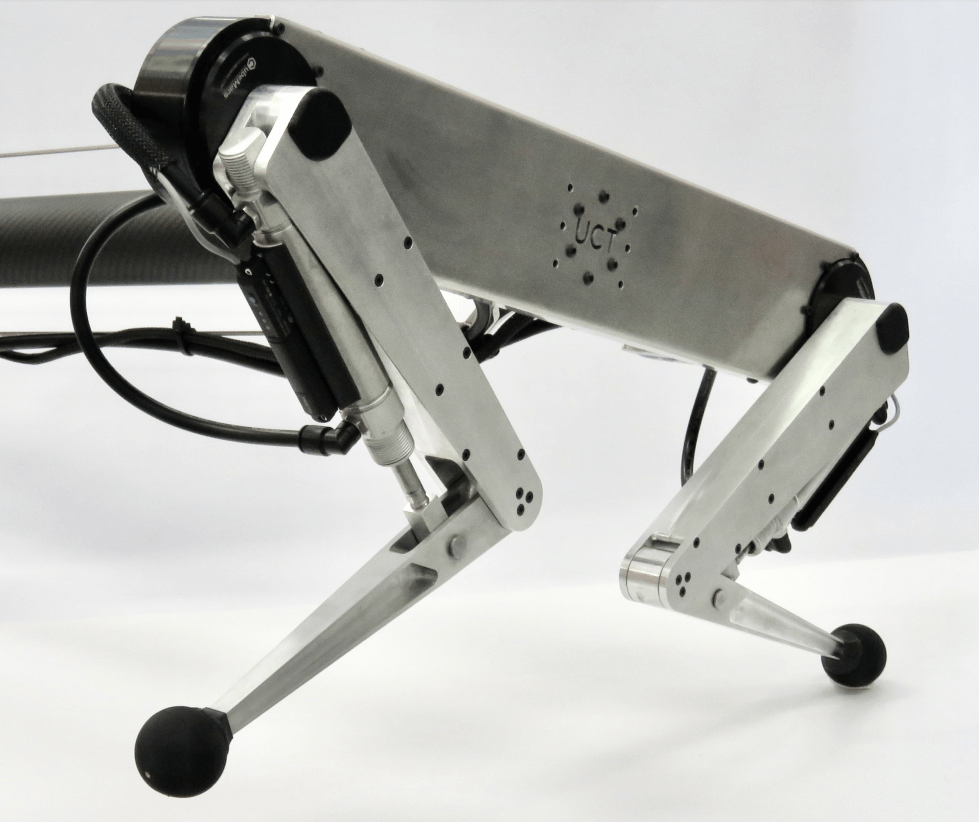
·Drive System: Equipped with CubeMars’ high-torque AK series quasi-direct drive motors (TMotor AK70-10), featuring a single-stage 10:1 planetary gear reduction.
·Performance Parameters: These motors have a peak output torque of 24.8 Nm and a maximum speed of 49.7 rad/s, ensuring high-precision motion control and robust power for the hip joint.
Knee Joint:
·Drive System: Utilizes off-the-shelf double-acting pneumatic cylinders (Festo DNSU-25-70-PPS-A) with a diameter of 25mm and a stroke of 70mm, generating a peak torque of approximately 18 Nm at the knee joint.
·Control System: Features fast-switching 2-way solenoid valves rated for a flow rate of 200 L/min, ensuring rapid response and stable control of the pneumatic actuators.
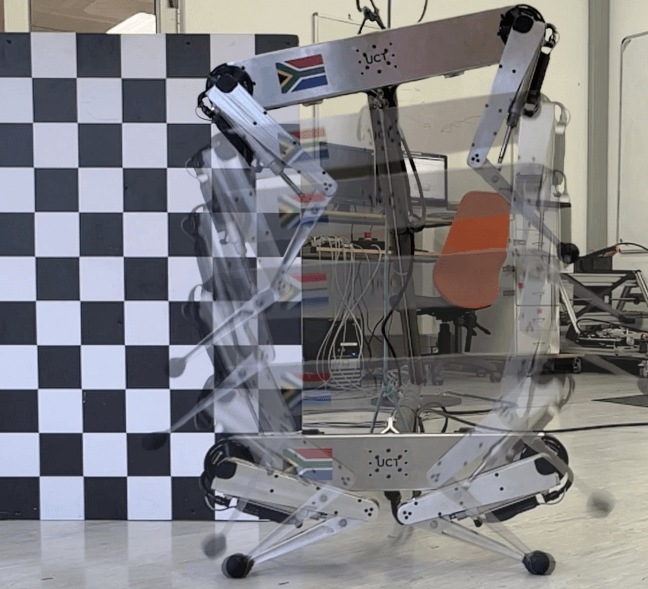
Kemba also comes equipped with a 2.5-meter-long boom arm, restricting movement to three degrees of freedom and providing state information on position, velocity, and acceleration to support precise motion control.
Control and Optimization
Kemba’s control system integrates the dynamics of pneumatic actuators in the high-level motion planning stage to generate feasible motion trajectories. Trajectory tracking is achieved using a Proportional-Derivative (PD) controller, combined with feedforward torque for the hip joint motors and valve commands for the knee joint pistons, ensuring efficient motion control.
Trajectory Optimization:
·Tools: The optimization problems were solved using the Python library Pyomo and the NLP solver IPOPT. The entire optimization problem, consisting of 8982 variables, takes approximately 55 seconds to solve on a dual-core laptop.
·Process: The optimized trajectories consider the overall dynamics of the robot as well as the dynamics of individual actuators, ensuring smooth and precise movement.
Exceptional Performance
Kemba has demonstrated exceptional performance in executing complex dynamic tasks. For instance, it can achieve a 0.5-meter jump and a maximum 1-meter jump, approximately 2.2 times its leg length. Even without feedback on the pneumatic joints, Kemba can match the desired trajectory with a height error of only 5 cm. This performance validates the utility of the model in high-level motion generation and the robustness of the robot hardware.
Contribution of CubeMars AK Series Motors
Kemba's success is significantly attributed to its high-performance drive system, particularly CubeMars' AK series motors. These motors, through precise manufacturing processes, control backlash to within 9 arc minutes, ensuring stable operation and exceptional power performance in challenging environments. This high-precision control is crucial for Kemba when executing rapid acceleration and high-precision tasks.
Conclusion
As an innovative achievement by the University of Cape Town research team, Kemba showcases its superior performance in dynamic behavior and precise control. Its hybrid design of electric and pneumatic actuators, along with the application of CubeMars AK series motors, places Kemba at the forefront of robotic technology research. Kemba not only provides an important platform for future robotics research but also inspires new ideas in legged robot design, advancing the field.
Through the development and testing of Kemba, the research team has demonstrated how to balance power and precision in practical applications, offering valuable experience and technical reference. This innovative quadrupedal robot holds significant importance in scientific research and offers broad prospects for future practical applications.