创建您的CubeMars账号

在当前的机器人技术中,双足机器人因其能够在复杂环境中灵活行动而备受关注。随着技术的进步,研究者们致力于开发能够与人类操作员实现高效同步的双足机器人,特别是在应对自然灾害或人为危险等紧急情况下的应用。
尽管人工智能领域取得了显著进展,现有的双足机器人在运动控制和灵活性方面仍难以与人类媲美。为了提升机器人在复杂和不确定环境中的表现,研究团队提出了一种基于双向反馈的远程操作系统。该系统旨在将人类操作员的运动智能实时映射到机器人身上,使机器人能够模仿操作员的步态、跳跃等动作。
在该项目中,研究者们采用了全身远程操作的方式,通过穿戴式设备让操作员与机器人进行互动。操作员的动作通过传感器捕捉并转化为机器人可理解的指令。为了确保机器人能够高效执行任务,研究者设计了一个双向反馈机制,主要包括两个方面:
1.实时运动数据映射:将操作员的运动数据实时缩放至机器人所需的比例,以确保机器人能够按照操作员的动作进行适当的反应。
2.反馈力控制:在机器人执行动作时,通过提供反馈力,使操作员能够感知机器人与自身运动的同步程度。这样一来,操作员可以根据机器人的速度和状态进行调整,从而实现更为流畅的协作。
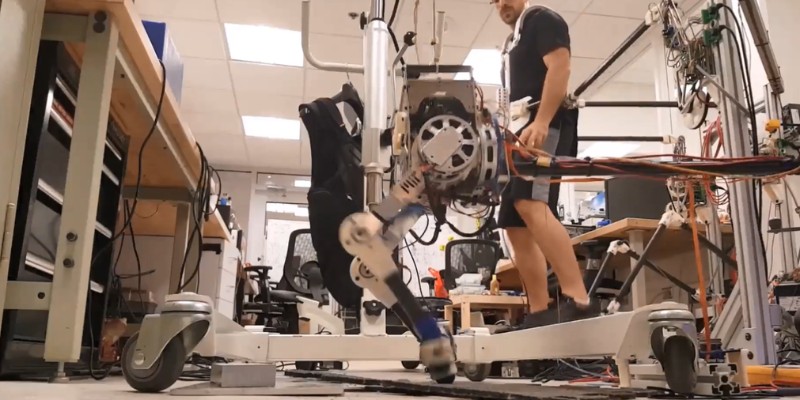
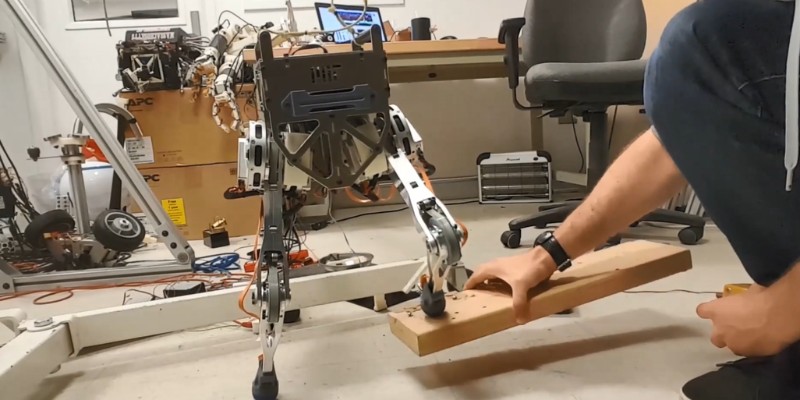
在实验阶段,机器人成功实现了多种动态动作,包括步行、原地踏步和连续跳跃。研究团队还展示了机器人如何在操作员的控制下,保持动态平衡,适应外界干扰。这些实验不仅验证了双向反馈机制的有效性,也为机器人在实际应用中的稳定性提供了重要支持。
这一研究成果展示了将人类运动智能与机器人控制相结合的潜力,为双足机器人在实际应用中的能力提升提供了新的思路。通过这种方式,机器人能够更好地适应复杂环境,特别是在紧急情况下,能够为第一响应者提供有效的支持。
未来,研究团队计划进一步优化控制算法,提升机器人的灵活性和响应速度,以应对更为复杂的任务。这一项目不仅推动了双足机器人技术的发展,也为人类与机器人之间更紧密的合作奠定了基础。



